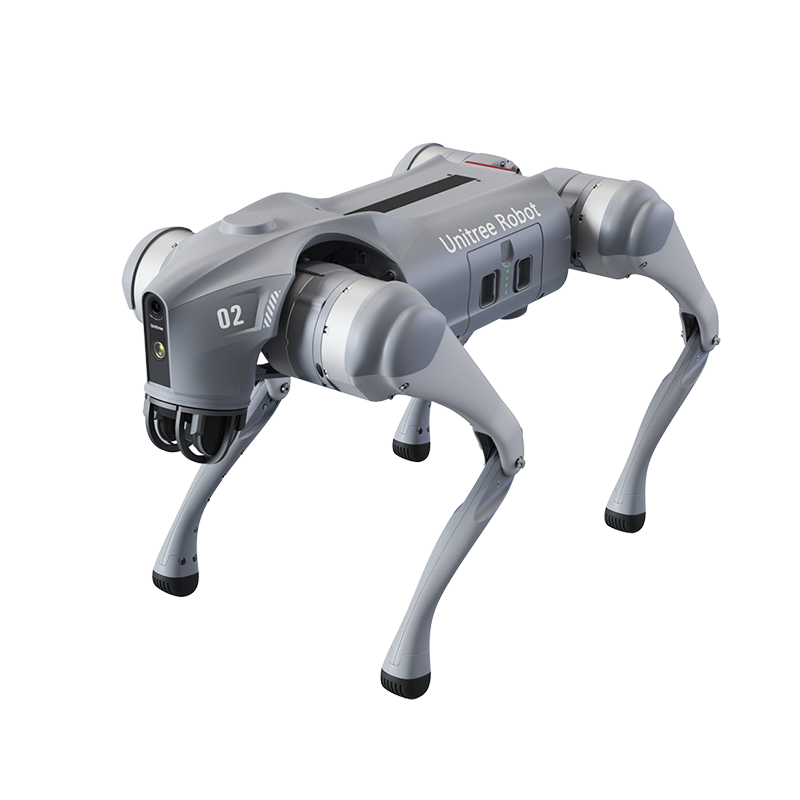
その他の仕様
速度: 1.0m/s | 可搬重量: 約3kg | センサー: VIOカメラ(Intel Realsense T265)、3D LiDAR(Livox Mid-360) | アクチュエータ: AK70−10 (CubeMars) x 12個、合計12関節
【Credit】
このロボットは、東京大学の河原塚健人氏がMITライセンスで公開したオープンソース設計データ
https://github.com/haraduka/mevius
をもとに製作されたものです。展示に際し、ライセンス条項に基づき適切にクレジットを明記しております。