Other specifiacations
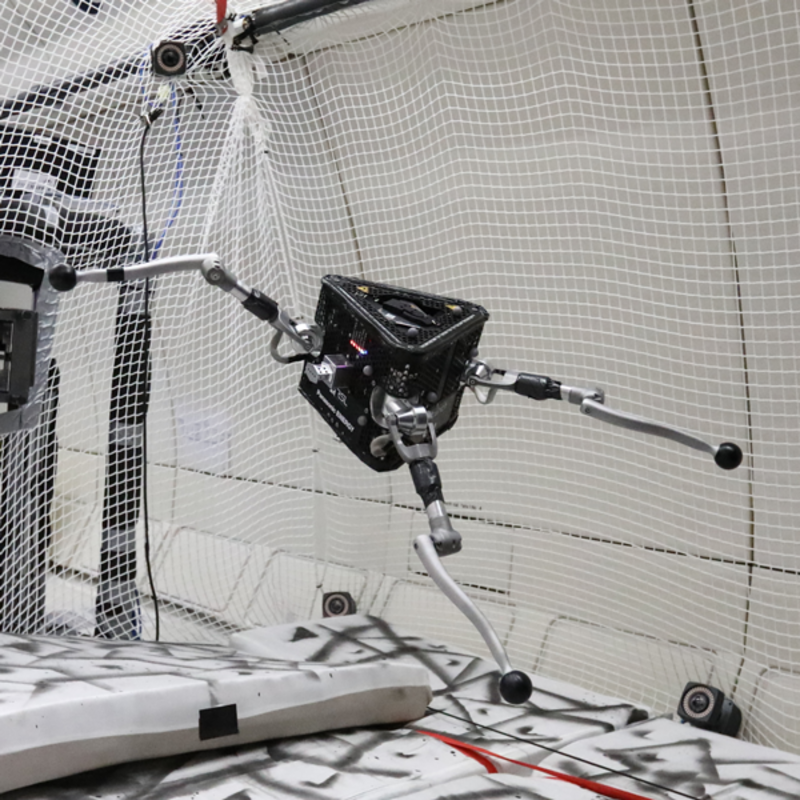
Reinforcement-learning-based jumping and attitude control | The robot can control its attitude during free flight to an accuracy of ~2 degrees by using the inertia of its legs | Directional jump-off control for precise locomotion in low gravity