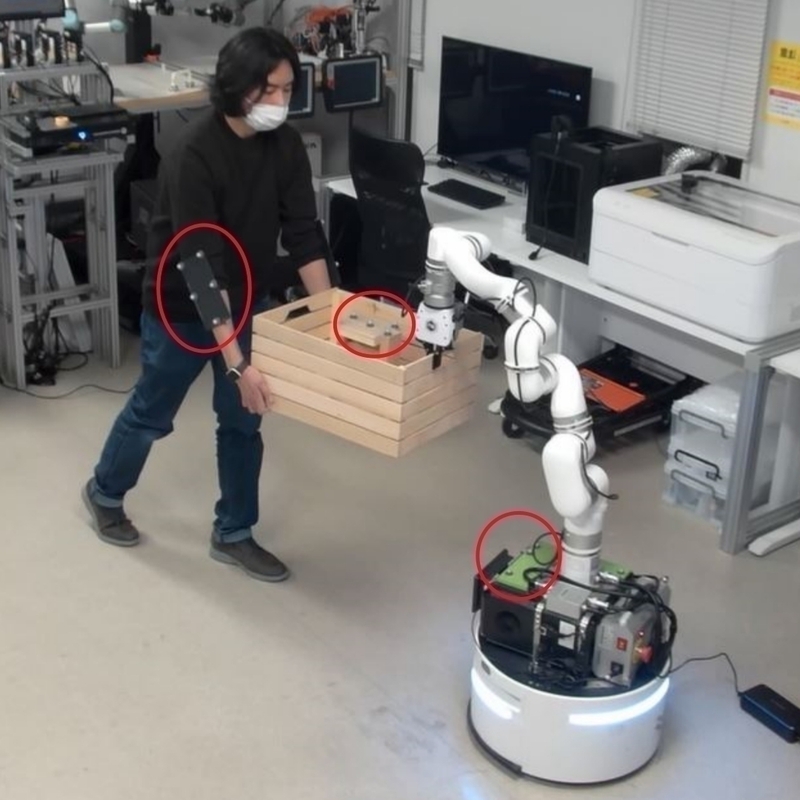
もっと見る大阪大学基礎工学研究科の万偉偉准教授は、ロボット工学研究室に、16台のNOKOV製モーションキャプチャカメラを配置し、実験者とロボットアームの位置データを取得しています。モーションキャプチャシステムを使用することで、人間の動作データを協働ロボットに送信し、個別に合わせた「ティーチング」を行うことができます。
この方法により、協働ロボットは人の動作姿勢情報をリアルタイムで取得し、即座に模倣して人間の実験者と共同作業し、協力関係を完成させることができます。モーションキャプチャシステムを用いたティーチング・ラーニング手法は、さまざまなロボットアームのハードウェアデバイスに適用可能であり、さまざまな生産現場の環境で柔軟なロボット操作を実現することができます。