Back
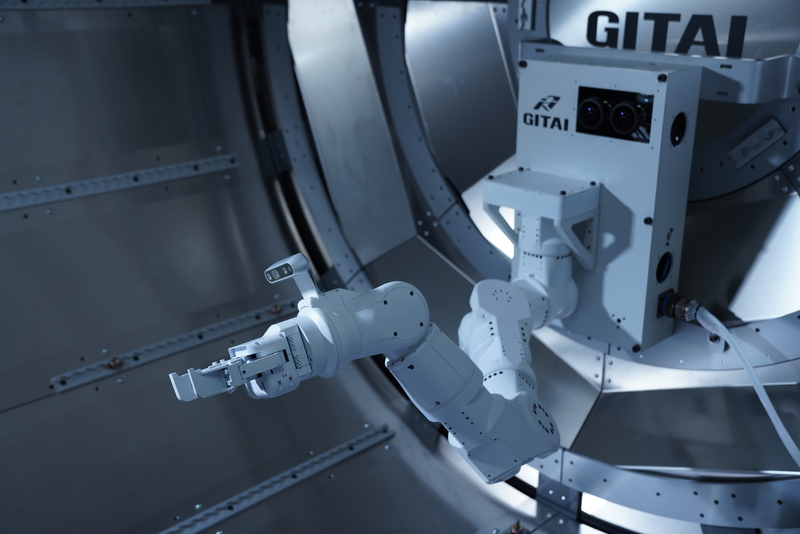
GITAI S1
Joined ATTA on 2024年1月
GITAI_S1
このロボットについて問い合わせる
画像クレジット: GITAI Japan株式会社
タグ / キーワード
GITAI S1
GITAI Japan株式会社
テレプレゼンス
リモートワーク
組み立て
つかむ
研究用
宇宙
アーム
概要
1m長の半自律ロボットアームシステム。宇宙ステーション船内外や軌道上サービス、月面基地開発における特定の作業を自動化するために開発された特化型作業ロボット。AIを用いた自律制御と、地上のオペレーターによる遠隔操作で操縦可能。クルーが危険にさ
もっと見る
1m長の半自律ロボットアームシステム。宇宙ステーション船内外や軌道上サービス、月面基地開発における特定の作業を自動化するために開発された特化型作業ロボット。AIを用いた自律制御と、地上のオペレーターによる遠隔操作で操縦可能。クルーが危険にさらされる可能性のある作業を引き受けることで、宇宙船の運用コストを下げ、安全性を高めることを目的としている。
基本情報
仕様・機能
活用・販売状況
関連する投稿
オリジナル名
S1
製作者
GITAI Japan株式会社
リリース日
2020年6月
生まれた地域
日本
できること
つかむ/ならべる
同系統のロボット
関連リンク
製品ウェブサイト
製作者ウェブサイト
プロフィール執筆者
Incubion Inc.
最終更新日: 2026/03/10
サイズ
-
重量
-
動力源
[バッテリー]
ネットワーク
[有線] USB-C
動作環境
Inside spacecraft
その他の仕様
自由度:8 + 1(手) | 動力:100Nm / 23.8rpm | 最大アーム長:1.0m | カメラ
販売状況
実証実験中
使われている地域
日本 | アメリカ合衆国
産業分野
科学・技術・専門サービス
価格
日本|アメリカ
関連する情報
User
User
User
Robot
Robot
PostVideo
アカウントを削除
アカウントは削除されました。よろしければ、
こちら
からフィードバックをお聴かせください。
RobotATTA! にログイン
メールアドレス
パスワード
パスワードをお忘れですか?
メールアドレスかパスワードに誤りがあるか、メールアドレスの認証が終わっていません
RobotATTA!に登録(無料)
おなまえ | 公開名
ユーザー名
英数字またはアンダーバーのみ使用
メールアドレス
パスワード
半角英字、数字、記号を組み合わせて 8 文字以上
パスワード(確認用)
登録することであなたはRobotATTA!の
利用規約
と
プライバシーポリシー
.に同意します。
入力された値が無効です
アカウントを既にお持ちですか?
ログイン
パスワードリセット
ご登録のメールアドレスを入力してください。パスワード再設定のためのリンクが送信されます。
Email
RobotATTA!に登録(無料)
サービス向上のためにお聞かせください
あなたに近い選択肢をお選びください。
私は...
仕事で使うロボットを探しています
ロボットを開発しています
代理店/インテグレータです
その他
詳細をお聞かせください
入力内容に誤りがあります
ご協力ありがとうございました!
ご回答はサービス改善に生かして参ります
初めての方は、ぜひ会員登録してください!
登録する
既に会員の方は
ログイン
してご利用ください。
Thank You Note