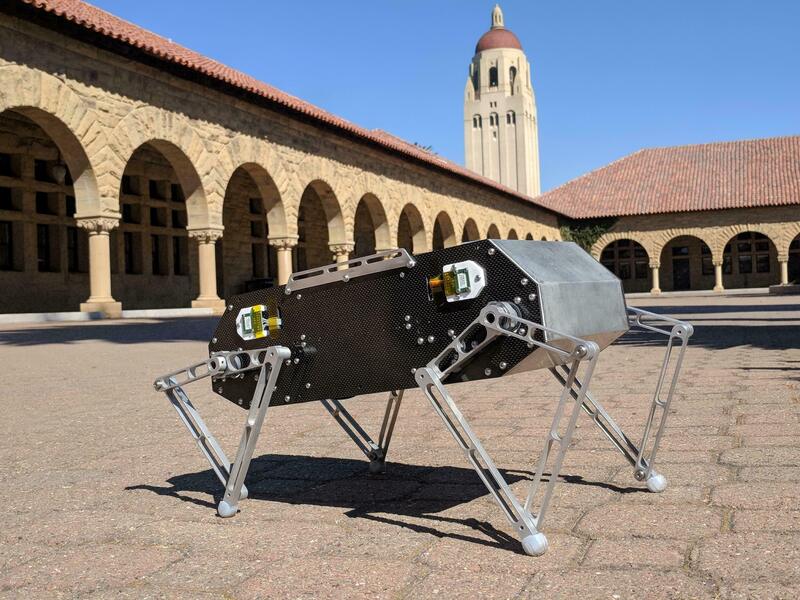
Open-source four-legged beagle-size robot, designed to be an accessible platform for robot research by students at Stanford University. Capable of performing acrobatic movements (jump, flip, trots, and more), as well as walking challenging
See moreOpen-source four-legged beagle-size robot, designed to be an accessible platform for robot research by students at Stanford University. Capable of performing acrobatic movements (jump, flip, trots, and more), as well as walking challenging terrain. Its 3D data, code, and supply list are freely available online, and anyone can build the robot at a relatively low cost (under US$3000).