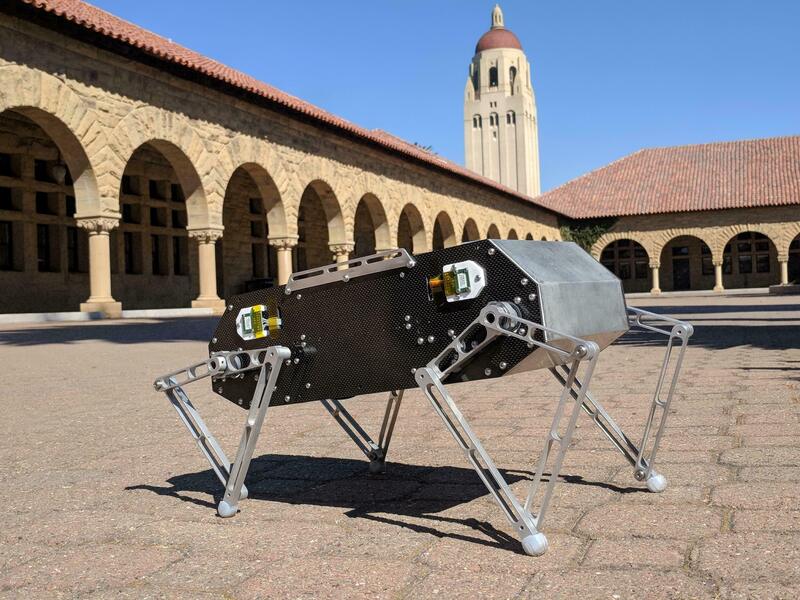
Quadruped (four-legged) robot that can perform agile maneuvers using trajectory optimization techniques studied in Robotic Exploration Lab in Stanford University. It has 12 degree-of-freedom, featuring high power actuators in a lightweight
See moreQuadruped (four-legged) robot that can perform agile maneuvers using trajectory optimization techniques studied in Robotic Exploration Lab in Stanford University. It has 12 degree-of-freedom, featuring high power actuators in a lightweight frame, and open-source.